Now that we know how to represent vector spaces and subspaces, it is time to find a basis of a subspace as a coordinate system.
Jenn, Founder Calcworkshop®, 15+ Years Experience (Licensed & Certified Teacher)
The Concept of a Coordinate System
What’s a coordinate system, you may ask?
A coordinate system is a one-to-one mapping of the points in a set into
All this means is that we are giving directions to our points.
Suppose we are working in the
The
Vector Coordinate System
The same thing happens with the vector coordinate system but with a twist.
Working with Basis and B-Coordinates
Assume
The coordinates of
Therefore, the coordinates of
Let’s see this in action.
Practical Example: Calculating Vector Coordinates
Consider a basis
Where
Suppose an
First, we will note that the B-coordinate vector is simply our coefficients.
Therefore, we can write our linear combination as seen below and calculate our vector:
Easy!
Notice that the entries in the vector
Since
In other words, if we start at the origin, we will travel 13 units to the right (east) and 5 units up (north).
But what if you want to find the B-coordinate vector?
Thankfully this can be easily found using the change of coordinate matrix
If
Then
Thus, if we want to find
For example, let’s find the coordinate vector
Where
First, we will write our given basis in coordinate matrix form.
Next, we are looking for the B-coordinate matrix. We will first augment and row reduce.
So,
Not too bad, right?
Alright, so to quickly recap.
What we’ve seen if
Therefore, if
Understanding Coordinate Mapping and Isomorphism
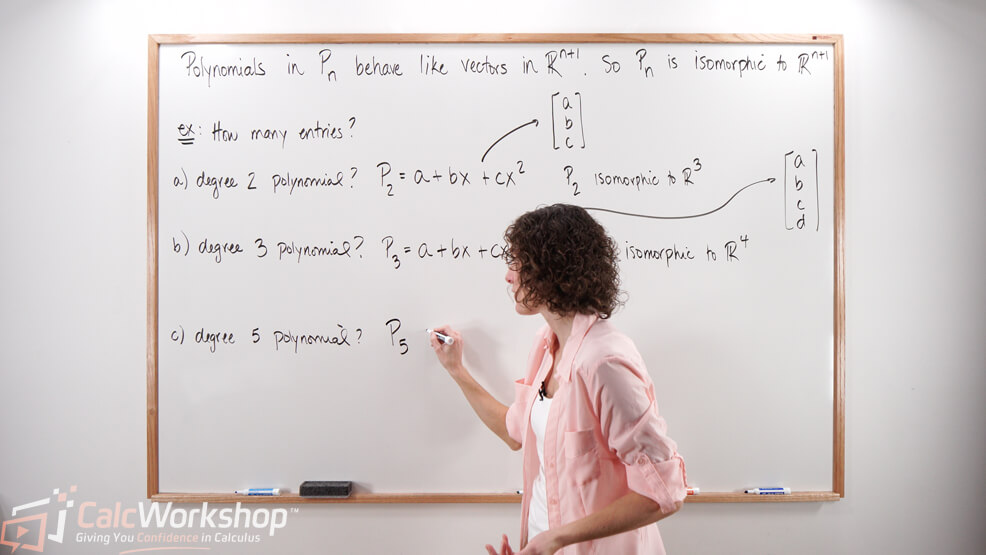
Now this leads us to the coordinate mapping of polynomials. But to do this, we must learn a new term: isomorphism.
A one-to-one linear transformation from a vector space
Therefore, an isomorphism is a bijection, as it is both one-to-one (injective) and onto (surjective), as it preserves the basic properties of a subspace.
Huh?
Isomorphism in Degree 2 Polynomials
Isomorphism means “the same.” Consequently, if we are talking about a polynomial of degree 2, then this is isomorphic, the same as dealing with
Practical Example: Spanning Set of Polynomials
For example, suppose we want to determine if a set of polynomials, such as
First, we recognize that
Now we create a matrix and row reduce. If the set spans
Therefore, because we have 3 pivots, we know that the set of polynomials does indeed span
See, not hard at all.
Introduction to Vector Space Dimensions and the Basis Theorem
Okay, now it’s time to talk about the dimensions of vector spaces and the Basis Theorem.
If a vector space
Conversely, if a vector space
Therefore, if we let
Practical Example: Subspaces of
For example, the subspaces of
- 0 -dimensional subspaces (only the zero subspace)
- 1-dimensional subspaces (any subspace spanned by a single nonzero vector, such as lines through the origin)
- 2-dimensional subspaces (any subspace spanned by two linearly independent vectors, such as planes through the origin)
- 3-dimensional subspaces (any three linearly independent vectors in
Hence, the Basis Theorem states that if we let
Importance of the Basis Theorem and Understanding the Dimensions
Why is this important?
Because the dimension of the null space, denoted
Cool!
Next Steps
In this lesson, you will:
- Dig deeper into the understanding of the dimensions of a vector space
- Make connections to the Invertible Matrix Theorem, Spanning Set Theorem, and Basis Theorem
- Revisit polynomials and transformations
- Grasp the idea behind isomorphisms
- Revisit the null space, column space, and row space
Get ready for a wild ride!
Video Tutorial w/ Full Lesson & Detailed Examples
Get access to all the courses and over 450 HD videos with your subscription
Monthly and Yearly Plans Available
Still wondering if CalcWorkshop is right for you?
Take a Tour and find out how a membership can take the struggle out of learning math.